paulrh
Member
- Joined
- Dec 1, 2018
- Messages
- 17
- Reaction score
- 10
It's exactly the same issue with those that believe in a god. If they want to believe in something that does not have good evidence then no attempt to show them facts will dissuade them and will in all likelihood make them double-down on their irrational beliefs.Recently a friend mentioned her interest in this topic, and her belief that there must be something to it since "so many people really believe it and they have good arguments". My immediate response was "what good arguments could they possibly have?!" She didn't have the arguments handy, so several hours of "wasted" time on the internet ensued. Lots of videos and articles there if you are so inclined!
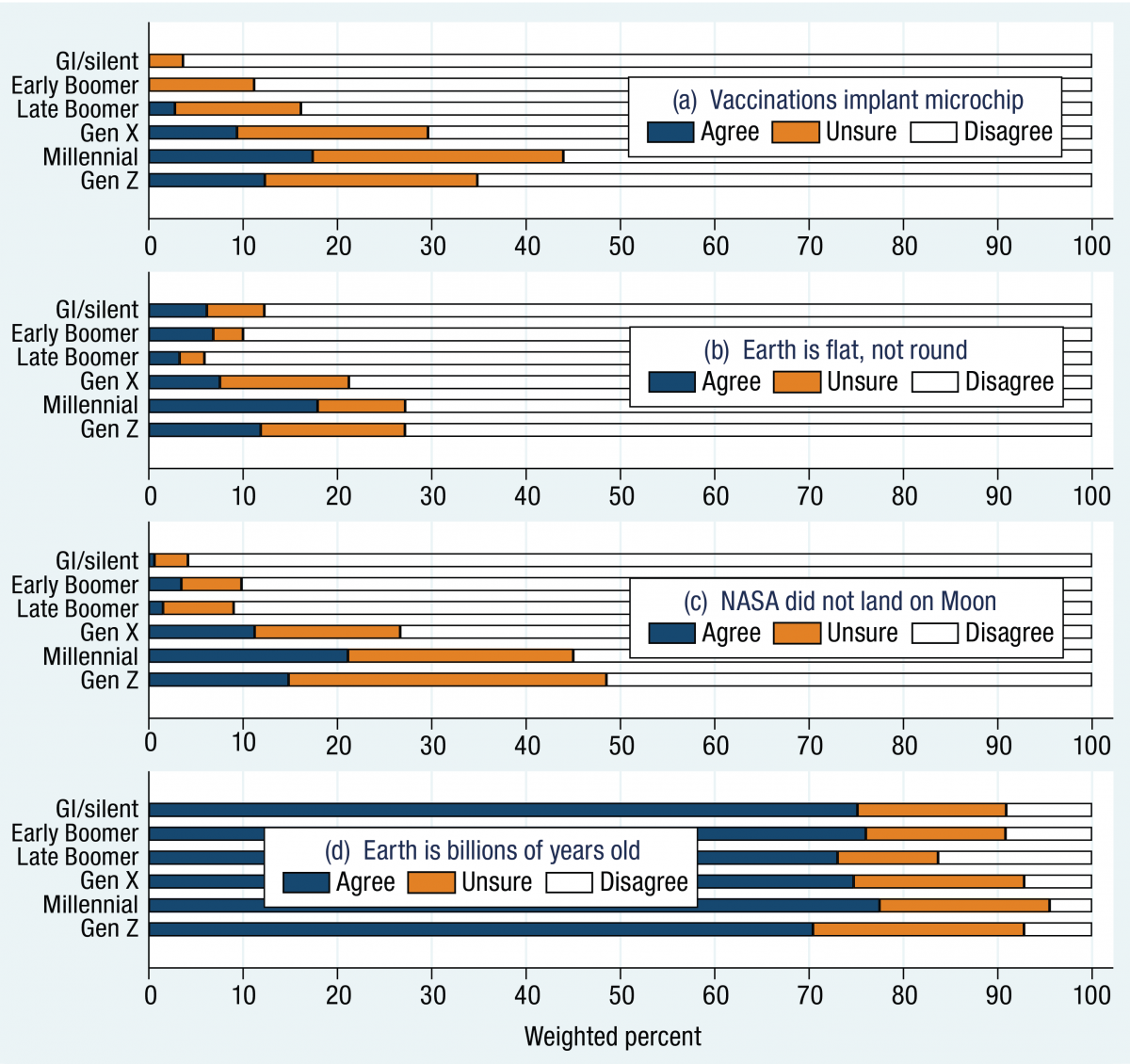
I discovered that she was right about the first part (many seem to really believe it) but I couldn't find any evidence of the second. I always thought it was a joke, not something that anyone was serious about. Then I ran across this survey conducted in 2021, and ~18% of the Millenials (20-40 year olds) agreed with the statement "the earth is flat, not round". I was blown away... https://carsey.unh.edu/publication/conspiracy-vs-science-a-survey-of-us-public-beliefs
The FEs don't concern themselves with having a working model of the flat earth... but the most popular theory seems to be a flat disk with the north pole in the center, a wall of ice around the periphery (Antarctica), and a dome over it. Most of the discussions are around what they believe are evidence that the earth couldn't be round. I went through all I could find and they were easily debunked.... but I realized that to someone who wasn't scientifically trained and practiced the evidence would seem plausible. I mean, when it comes to things that we can't figure out or have personal experience of, most of us just take the consensus view on faith. For many things in life all of us do exactly that... or maybe more commonly in recent years we are just confused and don't know what the truth is.
Still... in order to believe the earth is flat you'd have to believe that all the millions of scientists and regular people since Galileo, who work in any fields related to astronomy, celestial mechanics, satellites, GPS, navigation, etc... are in on the hoax. Who could possibly orchestrate and fund such a effort, and what would be the point?
I pondered what would be the easiest ways to convince a FE believer that the world is round. There are a lot of them, but... I realized that a sincere desire to believe coupled with a ready excuse like "it's fake", or "it's caused by distortion" would make this a lot harder. Maybe no evidence would suffice? I hope we don't revert to the dark ages....
As you mentioned, they would rather dismiss overwhelming evidence and default to their indoctrinated viewpoint without sufficient evidence. For religious arguments this is called " god of the gaps". Both FE's and the religious rarely step beyond their fellow believers and honestly examine the evidence. For them it is much more preferable to watch YouTube or be fed a diatribe from their pastor.
Believing in a FE is down to stupidity. Belief in a god and holding on to that belief is down to indoctrination and fear.